
| HOME | ABOUT | PEOPLE | PROJECTS | PUBLICATIONS | LINKS | (WIKI) |
|
Selecting and commanding individual robots
Alex Couture-Beil, Richard T. Vaughan, and Greg Mori
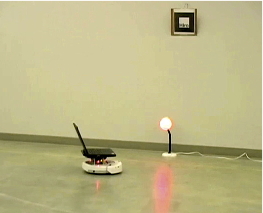
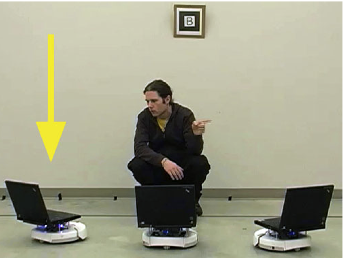
Selecting and commanding individual robots in a multi-robot system can be a challenge: interactions typically occur over a conventional human-computer interface, or specialized remote control. Humans, however, can easily select and command one another in large groups using only eye contact and gestures. Can similar non-verbal communication channels be used for human-robot interactions? In this work, we describe a novel human-robot interface designed to use face engagement as a method for selecting a particular robot from a group of robots. Face detection is performed by each robot; the resulting score of the detected face is used in a distributed leader election algorithm to guarantee a single robot is selected. Once selected, motion-based gestures are used to assign tasks to the robot. In our demonstration, robots are commanded to drive to one of two predefined locations. Presentation slides
A set of powerpoint slides, including videos, describing this work:
[ppt slides]
Publications
|

|
Vision and Media Lab, Simon Fraser University
TASC 8000 and 8002, 8888 University Drive, Burnaby, BC, V5A 1S6, Canada |