Introduction
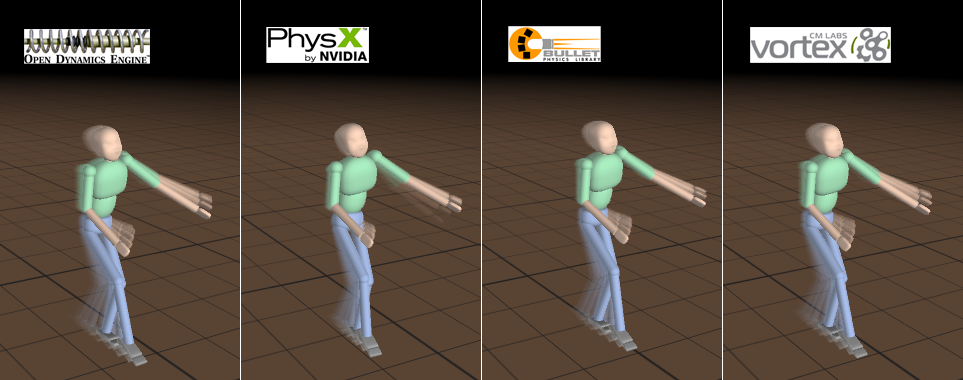
In the pursuit of pushing active character control into games, we have deployed a generalized physics-based locomotion control scheme to multiple simulation platforms, including ODE, PhysX, Bullet, and Vortex. We overview main characteristics of these simulation engines and illustrate the major steps of integrating active character controllers with physics SDKs, as well as the necessary implementation details. We also compare the robustness and performance of the locomotion control on different simulation engines. Our code is released online to encourage more interactions between the character control research community and the game development community.