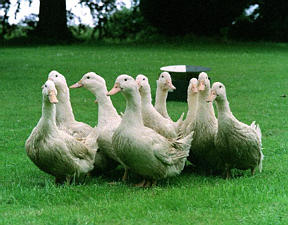
The Robot Sheepdog Project was a first investigation into the application of autonomous robots to control the behaviour of domestic animals. Three studentships were created to analyse and re-create the familiar sheepdog's task of gathering and fetching a flock to a specified goal position. The resulting theses present (1) a set of image processing techniques which can automatically generate models of flocking behaviour from video sequences [Neil Sumpter]; (2) a study of the behavioural responses of the ducks when exposed to a robot-like vehicle [Jane Henderson]; and (3) [Richard Vaughan] the development of an autonomous robot system that gathers a flock of ducks in a circular arena and manoeuvres them safely to a pre-determined goal position... read the full abstract
For more information, contact Dr. Richard Vaughan.
Video: Overview of Vaughan's project with narration (106MB hi-fi AVI) (35MB lo-fi AVI)
Summary paper: Vaughan, R., Sumpter, N., Henderson, J., Frost, A. and Cameron, S. Experiments in Automatic Flock Control (2000) Journal of Robotics and Autonomous Systems 31 pp.109-117(gzipped postscript)
DPhil thesis: Vaughan, R., Experiments in Automatic Flock Control (1999) University of Oxford (gzipped postscript A4) (gzipped postscript US letter)
Poster of initial results, presented at the Fifth International Conference on the Simulation of Adaptive Behaviour, Zurich, Switzerland, August '98. (gzipped postscript)
RTV - last update April 2004